本平台承担了包括数据挖掘实验在内的3门课程的实验教学任务,包含金融知识图谱等4个具体的实验项目,共20学时,如表所示。
表 虚拟仿真实验项目
序号 |
虚拟仿真实验项目 |
学时 |
适合开设的课程 |
1 |
单架无人机飞行路径规划 |
4 |
数据挖掘、人工智能、软件工程 |
2 |
多架无人机协同作业 |
4 |
3 |
多架无人机的编队控制 |
8 |
4 |
基于CNN的图像识别和实时目标检测 |
4 |
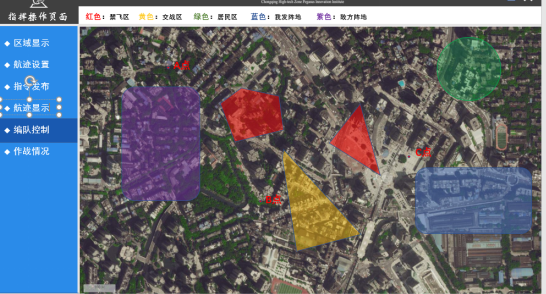
实验项目1:单架无人机飞行路径规划
内容简介:在城市攻防时,我方需要派出无人机对城市作战环境进行实时侦查。但无人机续空旷处易被敌方发现和击毁且航能力有限。所以进行无人机侦查时需要避开高层建筑以及禁飞区域,同时要求尽可能快速和经过最短距离到达指定作业。学生可以可设置各种区域、起飞坐标、作业坐标、最大飞行速度、无人机电池容量等参数进行实验,了解和掌握机单机无人机飞机路径规划的生命周期,使学生更快、更好的掌握无人机根据区域与坐标自动规划行径路线的开发。
实验界面:部分实验界面如图如图所示。
图编队控制(截图)
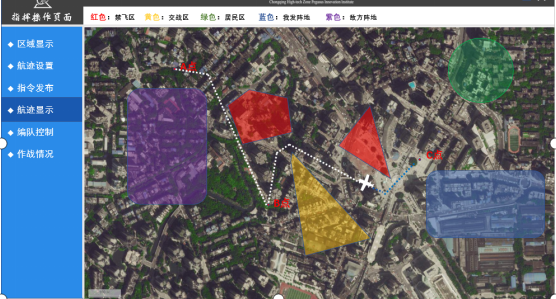
图轨迹路径规划(截图)
例:无人机从C点起飞,首先到达B点侦查,然后到达A点侦查,最后扫描敌方阵地(无人机扫描宽度10m,如无人机飞行100米,则扫描区域为100*10)。完成侦查后返回我方阵地。要求不能经过禁飞区,在交战区必须绕过高层建筑(高层建筑由平台或教师标记),在无标记区域可直线行驶。
实验项目2:多架无人机协同作业
内容简介:为了应对多变的战场环境,需要多架无人机协同作业,不同的无人机负责侦查,打击,中继,运输等作业目标。可设置各种区域、起飞坐标、作业坐标、最大飞行速度、无人机丁在居民区的停靠时间、无人机电池容量等参数进行实验,了解和掌握多架无人机协同作业的整个流程,使学生更快、更好的掌握无人机在不设置禁飞区与交战区情况下的多架协同作业的开发过程。
实验界面:部分实验界面如图如图所示。
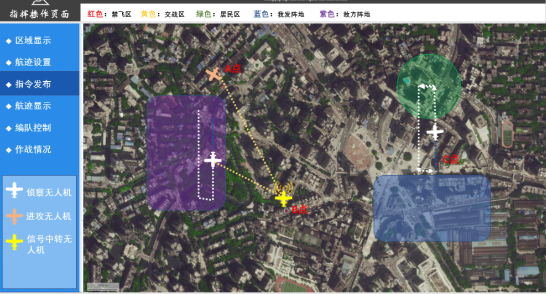
图 多架无人机协同作业指令发布(截图)
例:同时有四架无人机从我方阵地起飞。无人机甲飞往敌方阵地进行侦查,无人机乙前往A、B、C三点打击目标,打击完成后可安全返航。无人机丙作为无人机甲和乙的信号中继,要求无人机甲与丙,乙与丙之间距离不能超过1km。无人机丁往返于我方阵地与居民区间输送物资。要求甲乙丙丁同时起飞,丁在乙完成打击后才能在居民区降落并在甲乙丙返航前返回我方阵地。
实验项目3:多架无人机的编队控制
内容简介:在进行侦查或打击的时候往往需要多架无人机的集群作战,但是一个人控制多架无人机往往力有未逮,只能指挥一个无人机组,所以需要一个自动控制算法来控制同一无人机组的多个无人机。可以根据队形指令控制多架无人机在三维空间中的队形,并且在行驶过程中根据地形情况与飞行轨迹调整队形。若新加入一架无人机或掉线一架无人机,则需要实时改变队形。了解和掌握多架无人机的编队控制的整个流程,使学生更快、更好的掌握无人机在不设置禁飞区与交战区情况下的多架无人机编队控制的整个过程。
实验界面:部分实验界面如图如图所示。
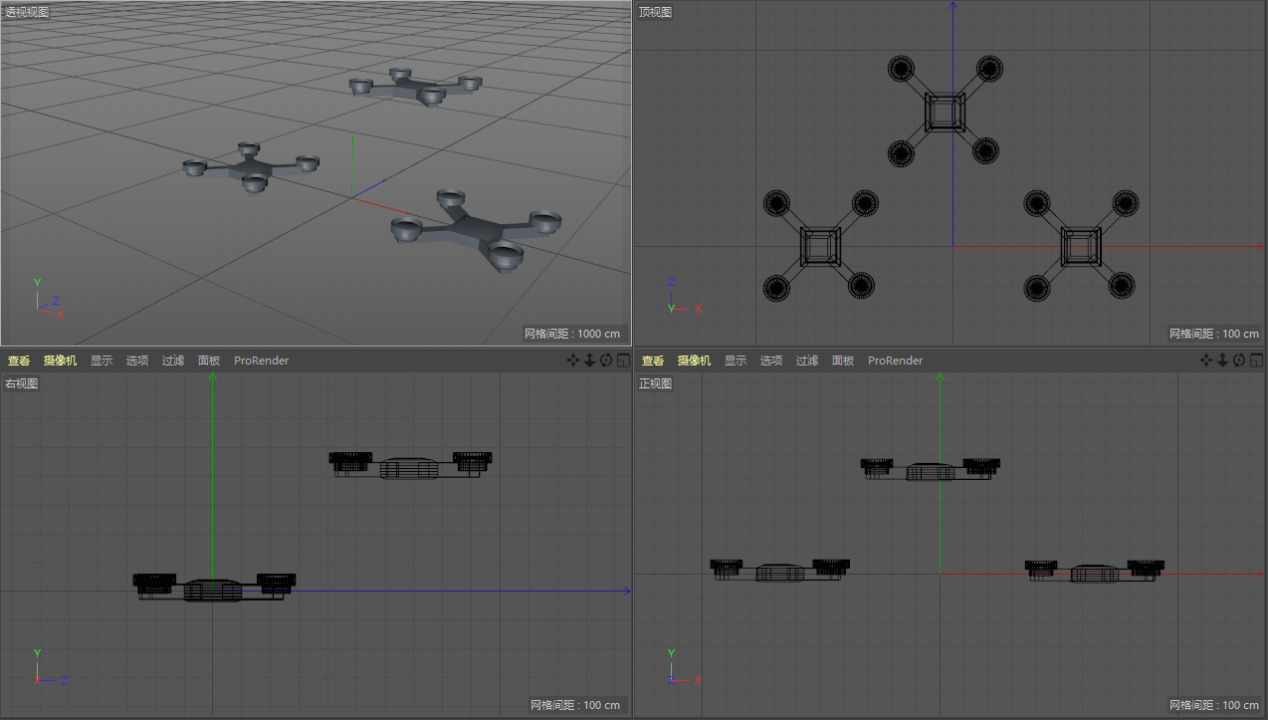
图 多架无人机的编队控制过程(截图)

图无人机飞行编队组网(截图)
例:5架无人机从我方阵地同时起飞,根据队形指令飞往C点。到达C点后新加入一架无人机(此时为6架),改变队形后飞往A点。到达A点后掉线一架无人机(此时为5架),改变队形后再次飞往B点(此时为4架)。B点再次掉线一架无人机,改变队形后返回我方阵地。在飞行过程中可根据队形指令信息实时改变队形。
实验项目4:基于CNN的图像识别和实时目标检测
内容简介:本实验项目包括3个实验,即CAFAR10数据集识别验证、障碍物类型识别、交通工具识别和车辆实时目标检测。通过本实验,让学生熟悉图像识别领域基础知识、卷积神经网络的基本思想和经典卷积神经网络,并编程进行网络训练,加深对图像识别的掌握。
实验界面:部分实验界面如图所示。

图 目标识别(截图) 图 训练过程可视化(截图)

